![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Un robot avec Arduino.
Sommaire
1 - Introduction
2 - Type de robot
3 - Quel matériel utiliser ?
4 - Programme de gestion.
5 - Intégration dans le chassis
6 - Résultat obtenu.
7 - Pour aller plus loin
8 - Liste du matériel
1 - Introduction
Cette page est dédiée aux papas bricoleurs qui voudrait s'initié avec leurs enfants à la création d'un robots.
Ce n'est pas très compliqué, les étapes sont en dessous.
Ecrivez moi si le flou persiste sur les explications.
2 - Type de robot
Qui dit robots, dit système automatique autonome qui est capable d'enchainer des opérations (logique et/ou physique).
Le robots que je vais détailler est une chenillette, qui se déplace pendant 30 secondes et qui évite les murs.
Vous pouvez faire un bras mécanique ou toutes sortes d'autres robots, les opérations de conception peuvent être transposées à d'autres type de projets.
3 - Quel matériel utiliser ?
Dans mon cas, j'ai trouvé une chenillette de type char avec 2 moteurs.
On trouve ce genre de chassis sur alipexpress pour pas très cher.
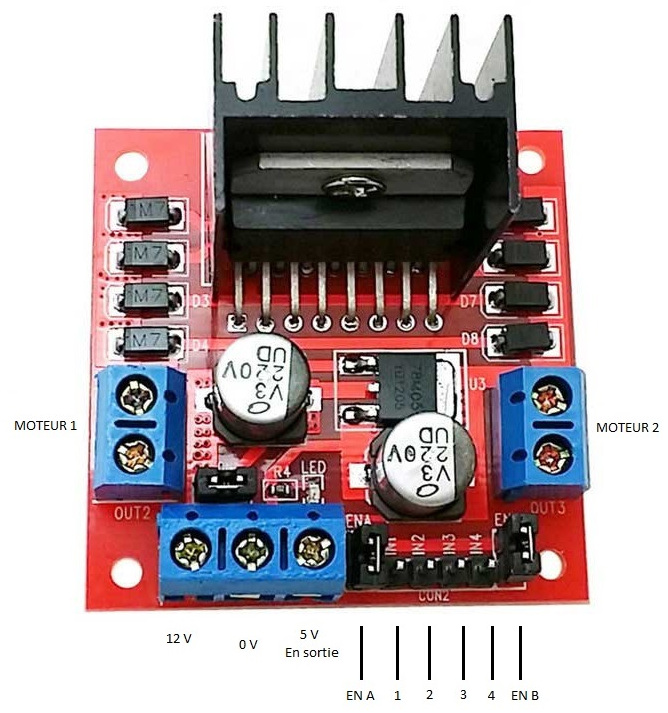
Pour piloter les moteurs il faut un "driver" de puissance qui se pilote via des niveaux de lignes. Le modele compatibles est le L293N ou le L298.
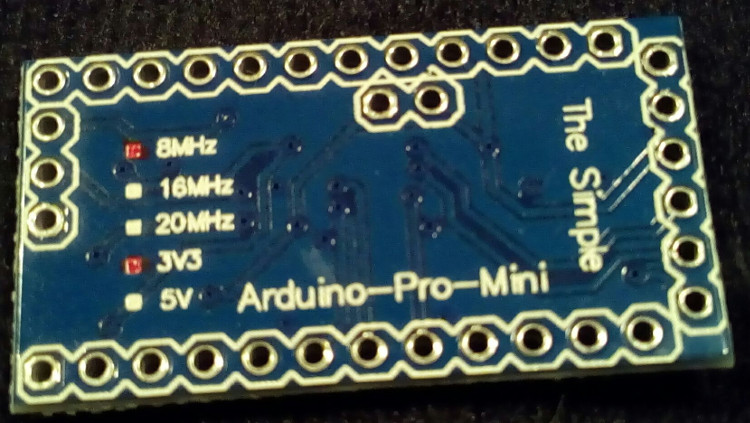
Un arduino, en carte UO R3 ou en pro mini si vous êtes un peu familier avec ce genre de carte et si vous avez un fer à souder)
Pour l'alimentation un support pour 6 piles alcaline sera suffisant sans dépenser trop. L'alimentation avec 4 piles fournira (6x1,5 volts) 9 volts ce qui suffit a alimeter les moteurs et la logique.
Un peu de matériel, tournevis, des fils pour la connexion, tous les élements se branchent avec des borniers.
Schéma
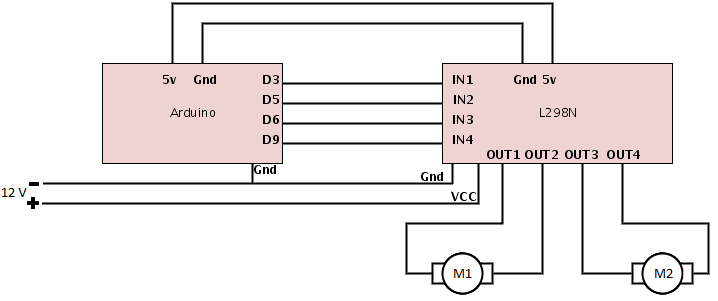
Le schéma est le suivant.
Le bloc de 4 piles se branche au "driver" de puissance des moteurs. entre la borne 0 v pour la masse et la borne 12 v pour le +
c'est lui qui va fournir une tension (6 volts) à l'Arduino qui va convertir en 5 volts entre la borne 0 v et 5 v . (Il faut que le cavalier soit en place.)
Ce dernier est centrale dans le montage électrique.
4 - Programme de gestion.
Un fois cablé, il faut passer à la programmation pour piloter les moteurs.
En admetant que vous ayez déja un niveau en programmation, la logique à programmer n'est pas compliqué.
Je vous propose un fichier de code qui contient l'ensemble de commande (ca s'apelle une librairie).
Cette librairie assure les fonctions de base pour faire tourner les moteurs.
Elle propose des fonctions
Un programme principale fera l'appel aux fonctions de la librairie pour donner les ordres. Les fonctions de la librairies actionneront les données du bus connecté de l'Arduino au "Driver" pour obtenir le mouvement voulu.
5 - Intégration dans le chassis
6 - Résultat obtenu.
Premier déplacement.
7 - Pour aller plus loin
Les travaux actuel porte sur l'asservisement de la vitesse.
La problématique est que pour un ordre donné au controleur de puissance, la vitesse est variable selon le terrain.
Il faut donc compter les tours de "roues" pour connaitre la vitesse de déplacement.
8 - Liste du matériel
Vous trouverez le chassis à chenille sur Aliexpress :
Chassis identique ou si le site ne le presente plus, il faut chercher "chenille chassis robot" (attention à l'ordre des termes.) Lien vers les pilote L298N pour piloter les moteurs du chassis